无人系统仿真模型库可以提供无人系统仿真中的各类精准模型。模型的颗粒度直接影响着仿真的还原度,飞思实验室经过几年的技术积累,建立了专业的模型库,同时具备实装装备模型库构建能力。
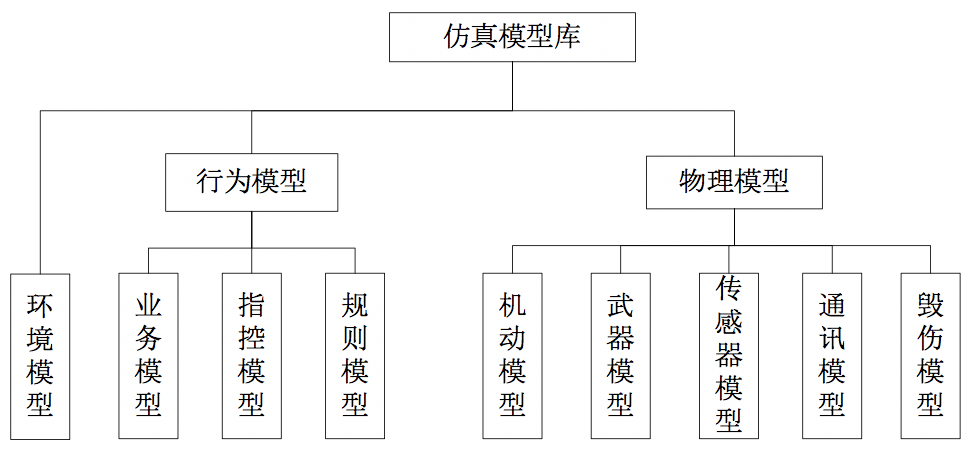
专业模型库构建基于规则模型的参数化建模技术,通过配置规则参数对规则进行实例化定制,借鉴组件化建模技术,将规则拆分为更细粒度的条件、状态、响应等要素,通过组合的方法构建特定的规则,采用行为树的行为建模方法,允许更灵活配置规则逻辑。模型库构成如下图所示:
"仿真系统的仿真模型"
01/人员模型
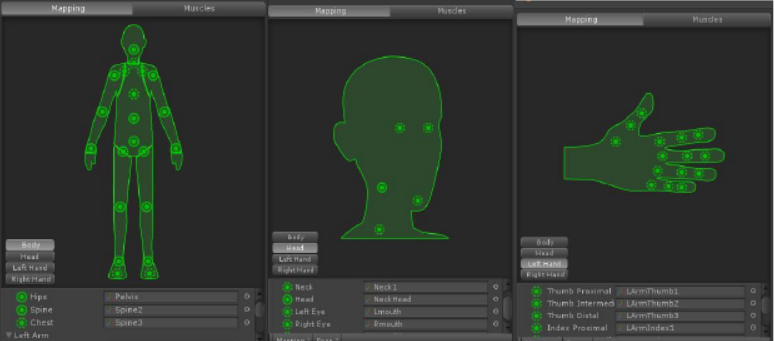
虚拟环境中,人员模型只要是指士兵模型,虚拟士兵的动作主要依靠骨骼的走向形成。本系统依据人的真实骨骼架构与骨骼关联,构建了以骨骼为基础、具有高还原度的士兵模型。士兵骨骼的架构。
该模型以士兵尾椎部位为根节点,构建了模型的上半身与下半身,自上而下以头部、颈椎、肩膀、手肘、手腕、胸膛、尾椎、胯关节、膝盖与脚踝为关节构建骨骼关联模型并且对相连接的部位进行 IK 解算,对这些关节进行操作可以完成士兵战术动作。
“人员模型”
在人员模型中,主要包含的内容包括人员基本动作、射击动作、感知模型和路径规划模型等。其中感知模型需要根据人员的实时性、局限性和客主观性来分别建立对应的模型库,例如:士兵观察能力有限,不能完全获取视线范围内的全部信息,则需在视觉角度范围内建立视觉模型触发器,当有目标进入该区域时即被触发器识别。

“虚拟士兵视觉触发器”
02/ 无人机/无人车模型
无人机/无人车模型包括无人机的动力学模型、无人车的机动模型、毁伤模型、侦察模型和指控模型。无人机为较小的飞机实体,按照指挥命令,飞行到地方阵地,并把符合要求的信息上报给指挥车。
无人机动力学模型
① 单无人实体仿真模型
实体仿真模型设计的第一步就是构建无人载具系统统一建模框架,它将整个无人载具系统分解为两个部分:机身系统与控制系统。机身系统与控制系统之间进行着传感器数据与控制信号。而机身系统又可以细分为四个子系统:机体子系统、执行器子系统、三维环境子系统和传感器子系统,如下图所示:
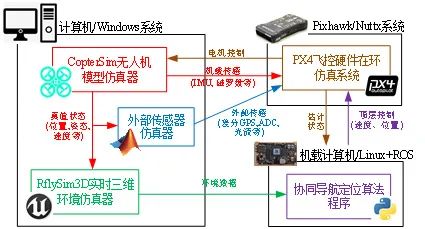
“无人机机身系统构成图”
机体子系统包含了机身、运行环境、力与力矩等内部子系统模块,是对机体在环境的运动、能耗和故障特性的整体描述;执行器子系统包含了飞行器与外界环境的相互作用,它接收来之控制系统的控制信号,然后产生的力与力矩来驱动机身运动;传感器子系统主要用于描述控制软件之外的所有电子硬件模型,主要包含传感器数据、通信协议、连接接口等特性;传感器分为两类,一类是插在Pixhawk飞控上的外接传感器(包括,差分GPS、外接磁力计、光流等),另一类是连在机载计算机上,与视觉相关的传感器(深度相机、激光雷达等)。平台对多传感器支持的解决方案如下如所示,Pixhawk相连的传感器通过“外部传感器仿真器”实现,它接收仿真的真值信息加入合适的噪声之后,传入到Pixhawk/PX4飞控中;而外部视觉传感器的添加需要在三维引擎中编程实现。
三维环境子系统主要用于描述无人机飞行的三维视景环境(包括树木、障碍物、公路等),用于为自主控制系统提供视觉数据的模拟。
在整个建模框架中,机身系统需要进行高精度建模,并且在实时仿真计算机中实现,最后连接控制系统软件或硬件,构成软件在环仿真或硬件在环仿真闭环。
上述子系统建模框架可以在Simulink等可视化建模与仿真软件中快速实现,在整个仿真模型搭建完毕后,可以利用自动代码生成的方法生成不同实时仿真计算机环境下的仿真软件,并且通过替代其中特定的子系统模块可以快速扩展得到不同类型的载具模型。
无人集群仿真模型
高逼真的单无人机模型是多机集群仿真的基础,在此基础上对带飞控系统的无人机整体进行扫频辨识,可以得到简化的速度控制质点模型(输入期望速度/位置,输出实际速度/位置)。然后对单机质点模型进行合适的拓扑组合可以得到简化的集群仿真模型,并在此基础上开发顶层的集群协同控制算法,并连同视觉算法形成完整的闭环。其次,对每个无人机采用复杂的高精度非线性模型并与控制器硬件相连形成半物理仿真控制闭环,将多个仿真控制闭环进行拓扑连接就可以得到高逼真的复杂集群仿真模型,在此基础上可以对集群协同控制算法进行测试、验证与评估。
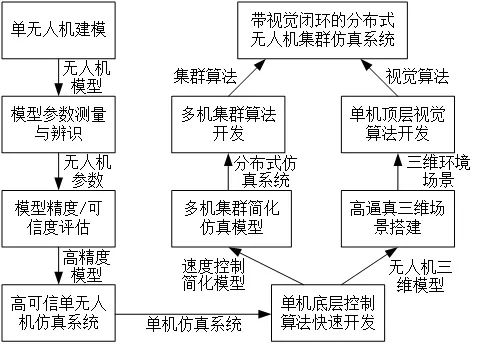
“无人集群模型开发方案”
②无人车机动模型
采用的基于模型的设计方法,其理念是对系统的各个方面进行精确全面的建模,从而实现在项目开发的初期就能够对系统的最终性能进行有效地预测。
无人车、无人船等归属于无人载具系统。实际上,不同的无人载具系统都包含了机体、传感器、控制系统、执行器、环境等组成部分,他们可以用相同的框架来描述。不同的载具系统都需要使用传感器来估计自身状态,都需要控制系统作为大脑来实现自主运行,都需要与环境中的地面、障碍、空气等相接触,都面临着相同的底层安全逻辑、顶层视觉、集群控制等问题。因此本项目拟提出一种适用于所有无人载具系统的统一建模框架,它在完成本期项目的多无人装备集群控制的同时,预留了接口来保证后期多种类型无人装备的协同控制,以及多种维度(地面无人车+空中无人机+水中无人船)的协同集群控制。

“无人载具系统的统一组成框架”
③无人机/无人车探测模型
无人机/无人车探测模型是基于功能仿真基于功能仿真构建的,根据模型(雷达)性能参数,综合回波信号功率、电磁干扰信号、系统热噪声功率水平等参数,求取目标的信噪比,计算其检测概率。
目标的被探测概率主要跟目标距自身的距离,目标相对自身的径向移动速度,目标的雷达反射面积(可通过查表获取),环境的降雨等因素有关。通过经验公式可以计算得到被探测的概率。
④无人机/无人车毁伤模型
无人机/无人车毁伤物理模型,主要是通过在遭受到敌方武器攻击后计算对本实体的毁伤情况,来判断本实体的存活状态。获取的攻击消息包括攻击方的武器类型、攻击目标类型、弹体数据(开火PDU)以及目标防护情况等。目标的毁伤等级分为:无,轻,中,重和彻底毁伤五个等级。
⑤无人机/无人车通讯模型
通讯物理模型主要包括天线模型和接收机噪声模型,用于计算电台的发射功率和噪声,并实时发送给网信系统进行通联状态的计算,同时当无人机想要与目的节点进行通信时,向网信系统请求当前节点与目的节点的通联状态,然后再进行数据收发。
天线模型主要考虑天线方向和增益。因为电台在通信时是无方向的,军用短波、超短波战术电台使用鞭状天线(Whip antenna),鞭状天线在窄频段范围提供全方位角内均匀不变的约2 dB的增益,把输入功率放大约1.6倍。对于通信干扰机来说,其干扰要有一定的方向性,天线在主瓣方向上具有较大的增益。天线增益和天线高度用来计算干扰机到达通信机的干扰功率。波束方位宽度、波束俯仰宽度、波束方位中心角和波束俯仰中心角用来计算通信机是否在干扰机的干扰椎体内。
接收机噪声模型主要模拟理想的接收机中的噪声,包括电台的噪声系数和热噪声能级(KTB)。在热噪声能级(KTB)中,K是玻尔兹曼常数,T是开尔文温度,B是接收机有效带宽。在地球大气中,假定温度为2900K,则所有电台的噪声都可以用下列公式:KTB=114dBm+101g(BW)其主要流程如下图所示:
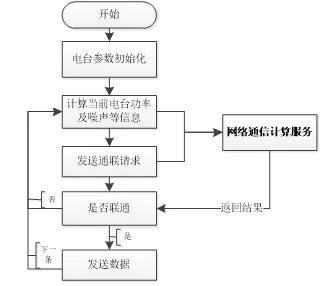
“通讯物理模型流程图”
⑥无人机/无人车决策模型
无人机/无人车决策模型是无人机与无人车实体与上级交互的模型,其功能是接收上级下发的命令,解析命令,并把命令转发给实体内其他模型。
无人机/无人车决策模型核心采用行为树进行行为决策。行为树的编辑界面,采用定制化开发,用户可以自行组建Agent模型和对应的行为树,支持库模块负责保存和管理这些行为树。推理模块负责解析和运行行为树。指挥决策模块中调用行为树,并根据行为树的输出,生成对应的决策命令,分发给其它模型进行处理。下图是一个典型的选择武器进行攻击的行为树的部分逻辑图,如下所示:
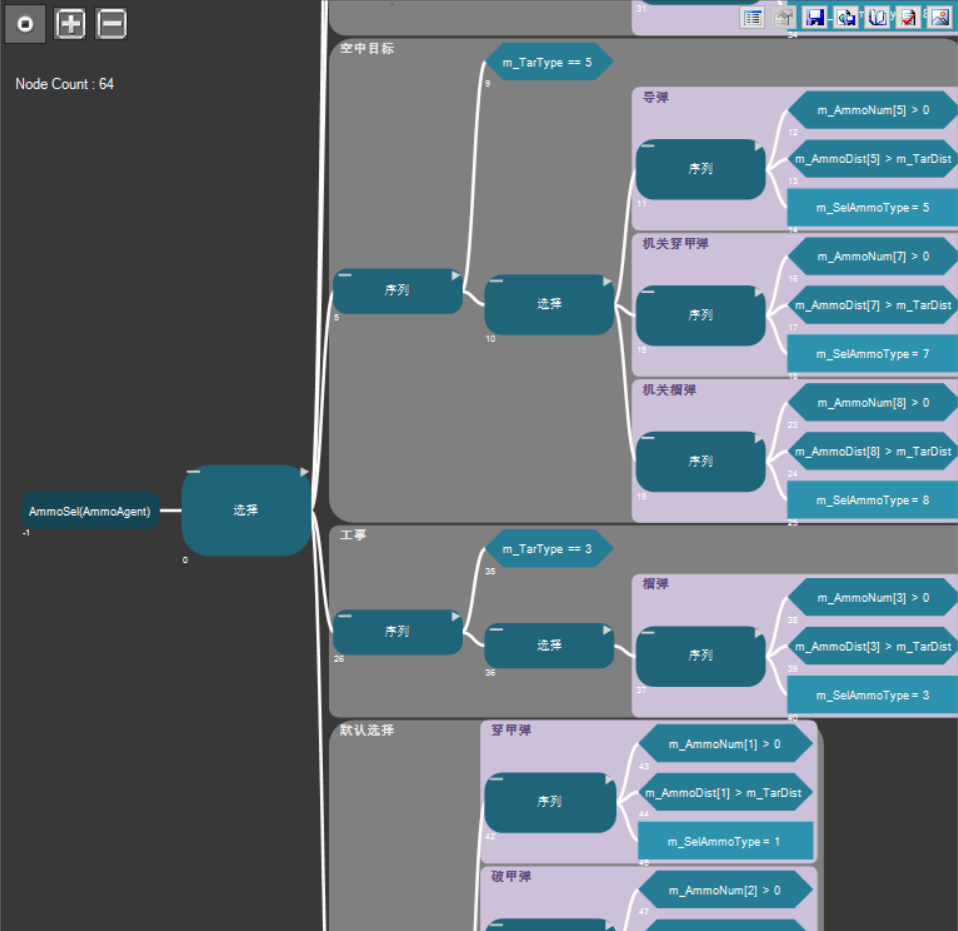
“武器选择行为树”
03/无人装备实体
无人装备实体使用现役装备和在研各类型装备进行模拟,通过模型装配工具模拟相关装备的物理模型和参数,可以大大提高仿真环境设备的真实性与沉浸感。
基于系统中高科粒度的仿真模型库,实现了对各类无人装备数字孪生级别的精准仿真及对抗场景的极度沉浸。





 •
•  •
•  •
•  •
•  •
•  •
•  •
•  •
•  •
•  •
• 