螺旋桨是指把发动机或电机的旋转轴功率转化为推进力的装置。在无人机系统中,属于动力系统的一部分,螺旋桨的性能,以及螺旋桨与发动机或电机的适配性直接影响到无人机的飞行性能。
一、螺旋桨工作原理
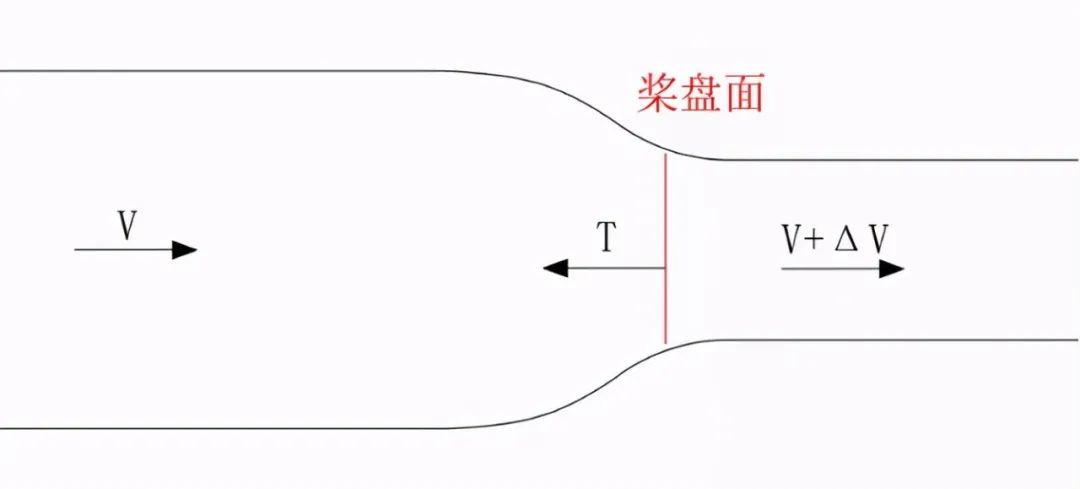
1、从动量角度分析
螺旋桨的旋转平面称为桨盘面,螺旋桨对流过桨盘面的空气做功,空气流经桨盘面后动量增加,加速的空气会对螺旋桨产生反作用力,这个反作用力就是螺旋桨的推力。
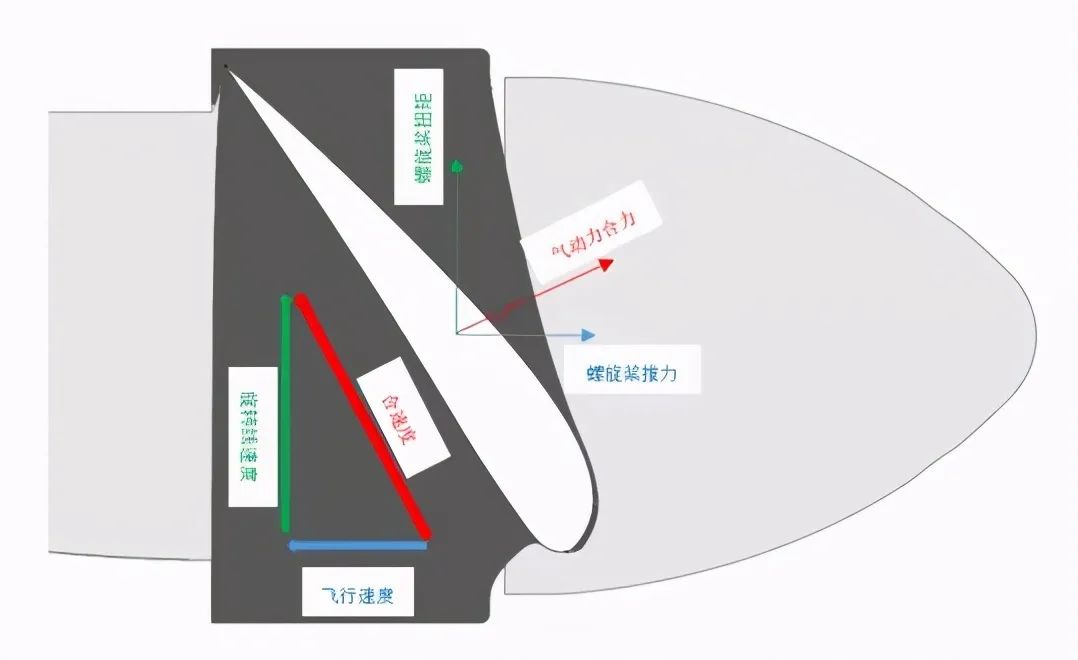
2、从空气动力学角度分析
螺旋桨可视为一个旋转的机翼,气动原理与机翼相同。螺旋桨垂直于桨径方向的剖面是一个翼型,称为螺旋桨叶素。每一个叶素均会产生气动力,所有叶素的合力即为螺旋桨的产生气动力,该气动力沿飞行方向的分力即为螺旋桨的推力,沿旋转方向的分力对旋转中心的力矩即为螺旋桨的扭矩。
二、螺旋桨几何参数
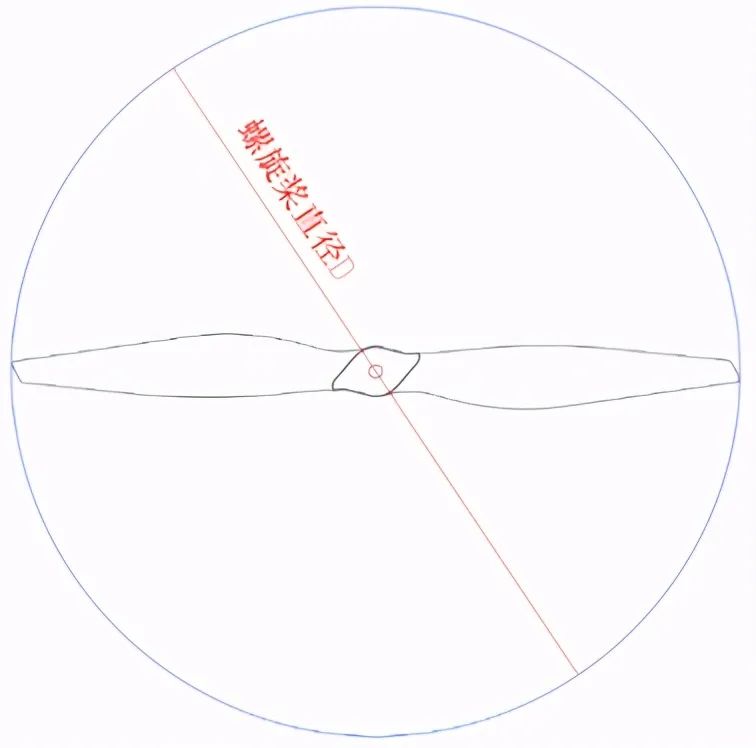
1、 螺旋桨直径D
螺旋桨直径是指桨尖所画圆的直径。一般而言,螺旋桨的直径需要通过发动机功率、转速、无人机飞行速度、桨叶数目以及螺距综合确定,螺旋桨直径的单位一般是英寸。
2、 桨叶数目
桨叶数目也是螺旋桨的一个重要参数,2叶桨、3叶桨和6叶桨是最常见的螺旋桨。无人机的螺旋桨一般是2叶桨和3叶桨,例如大鹏系列无人机采用的都是2叶桨,我国的彩虹系列无人采用的是3叶桨。螺旋桨的桨叶数目越多,螺旋桨的可吸收的最大功率越大,但是螺旋桨的效率越低,另外随着桨叶数目的增加,螺旋桨的重量也会随之增加。所以桨叶数目的选择需要结合发动机的功率,在保证具备可以吸收发动机最大功率和螺旋桨直径约束的前提下,尽可能减少桨叶数目,以提高螺旋桨的效率。

3、 叶素
螺旋桨垂直于桨叶径向方向的截面形状称为叶素。这和飞机的机翼类似,可以认为螺旋桨是一个带有大扭转角的机翼。叶素的气动性能直接影响螺旋桨的性能,相同型号的螺旋桨选用的翼型不同,其性能也不同,一般需要通过做大量的计算和测试来确定螺旋桨的性能。
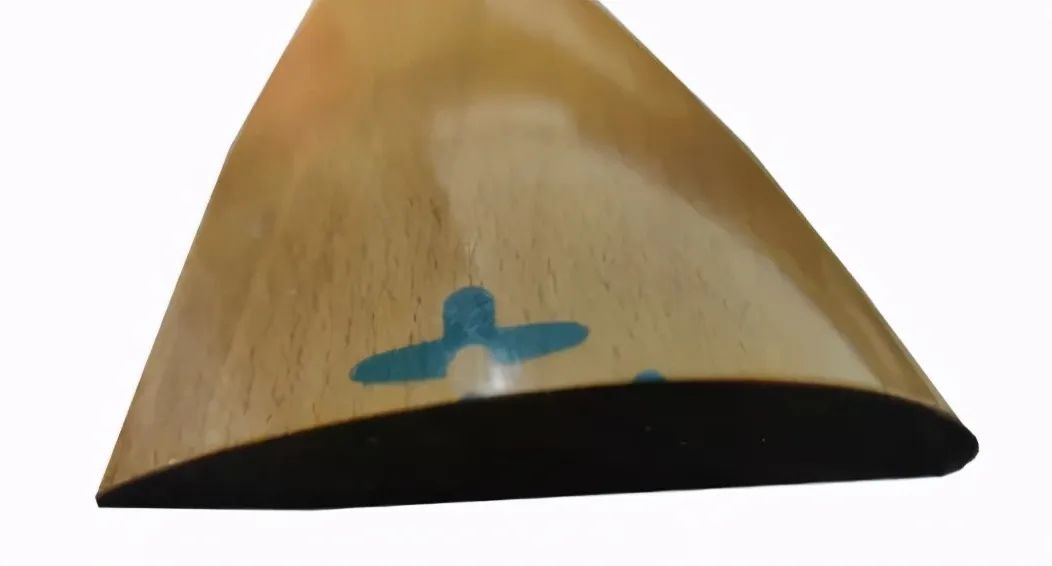
螺旋桨叶素
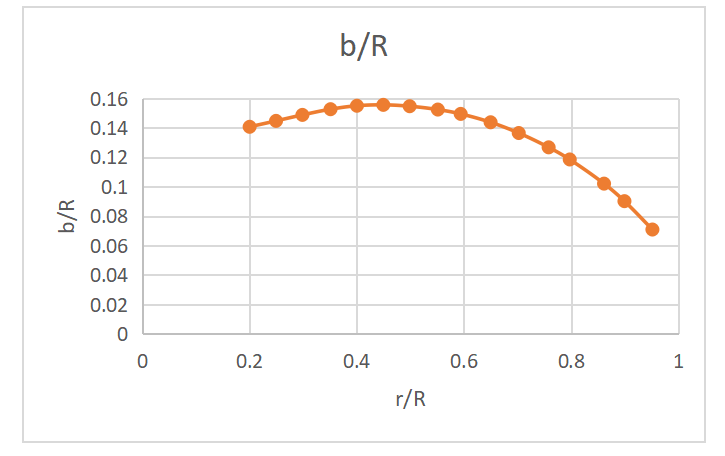
4、 桨叶宽度b
叶素弦线长度称为螺旋桨的桨叶宽度b。由于螺旋桨不同位置的效率不同,桨根和桨尖的效率比中部区域的效率低,因此为了提高螺旋桨的整体效率,中部区域的弦长一般大于桨尖和桨根的弦长。一般采用弦长与螺旋桨半径的比值来表示宽度分布,典型的宽度分布如图所示。
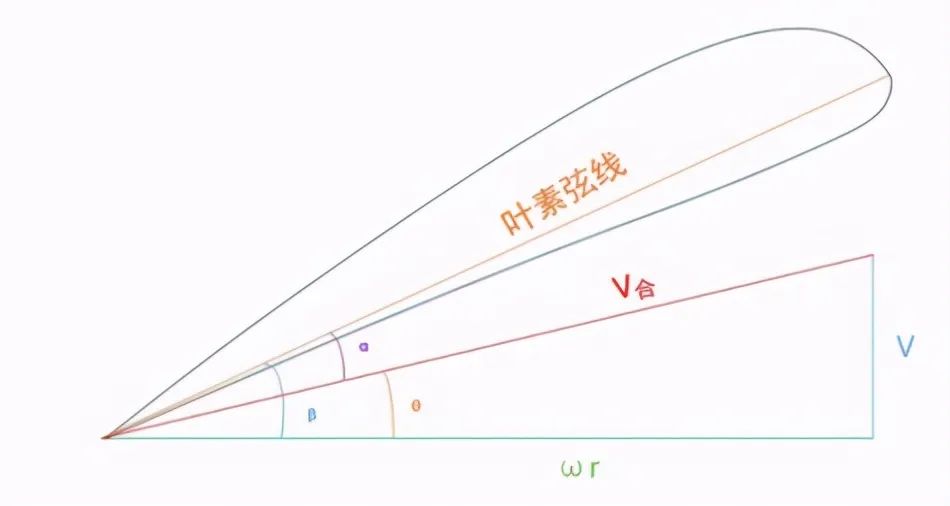
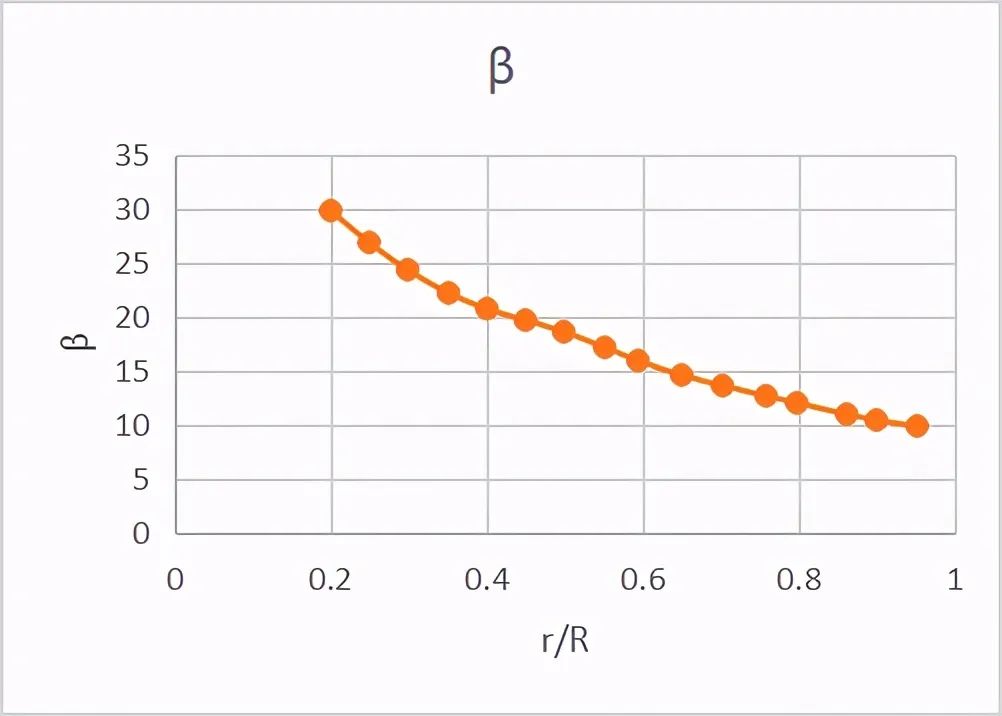
5、螺距
螺旋桨的螺距是指螺旋桨在一个固定介质中旋转一周前进的距离。螺距是由螺旋桨的桨叶角决定的,桨叶角(β)是指叶素弦线与螺旋桨旋转平面的夹角。相同转速(V)下,螺旋桨不同半径位置的线速度(ωr)不同,导致气流的方向角(θ)不同,为了使每个叶素都能在有利迎角(α)下工作,所以桨叶角不是一个固定值,典型的桨叶角分布如图所示。为了满足不同速度的飞行,可以将螺旋桨设计成可变桨距的螺旋桨。在变距机构的控制下,根据飞机的飞行速度的变化,改变螺旋桨的螺距,提高螺旋桨的效率。
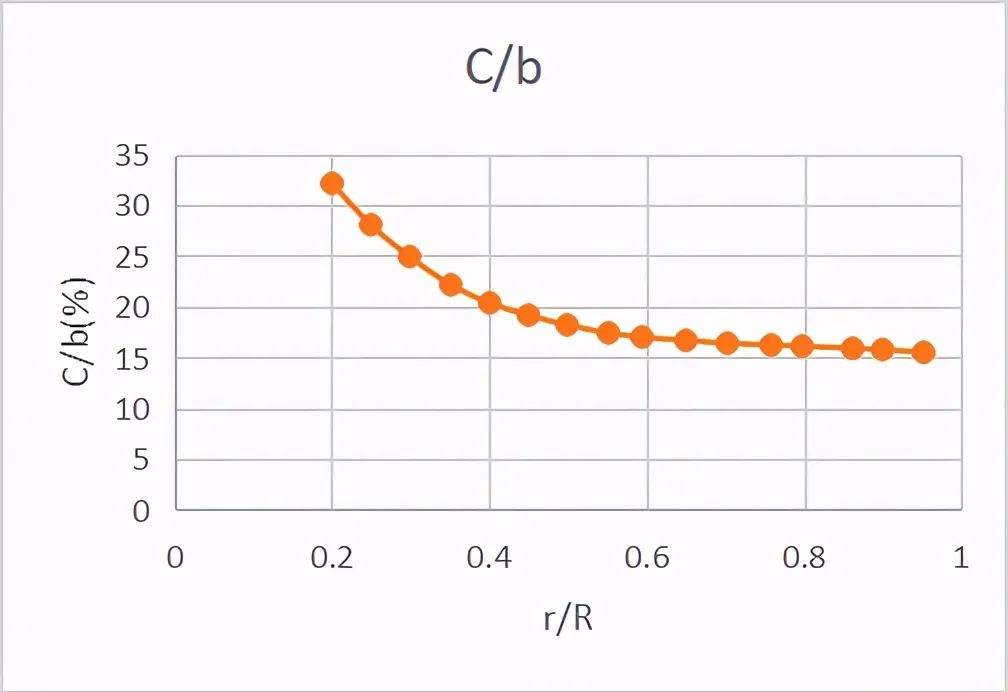
6、 桨叶厚度C
在任何半径处叶素的最大厚度 C, 称为该处桨叶的厚度。为了在保证螺旋桨的强度的前提下尽量减轻重量,螺旋桨的厚度从桨根到桨尖是单调递减的。一般用相对厚度(C/b)来表示螺旋桨的厚度分布,典型的厚度分布如图所示:
三、螺旋桨分类
无人机螺旋桨的分类方式有很多。
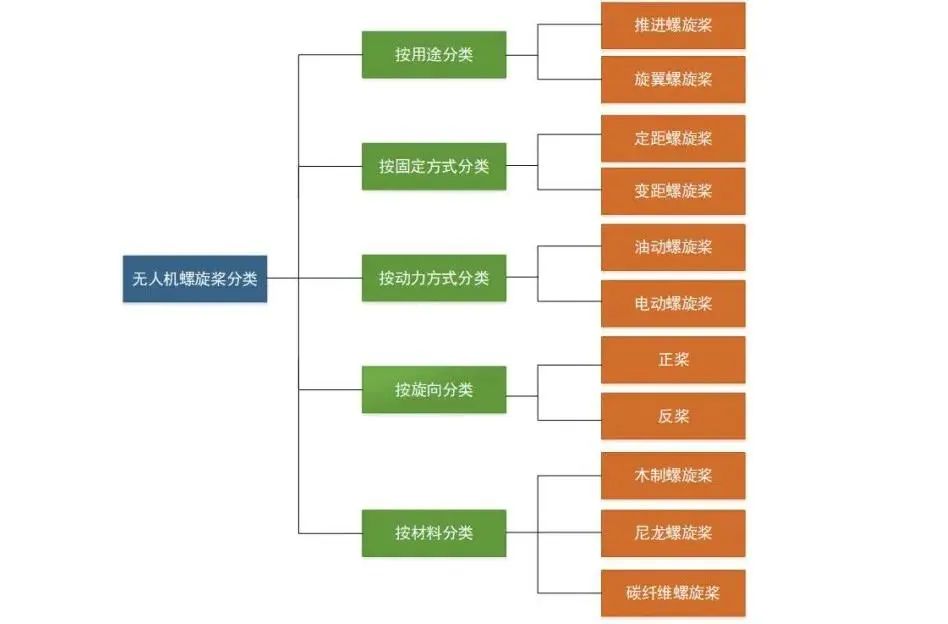
按用途分类可以分为推进螺旋桨和旋翼螺旋桨,推进螺旋桨是为飞机提供平飞所需推力的螺旋桨,旋翼螺旋桨是直接为飞机提供升力的螺旋桨。旋翼桨与平推桨相比,螺距较小。
按固定方式分类可以分为定距螺旋桨和变距螺旋桨,定距桨的优点是不需要变距机构,结构重量轻,系统可靠性高。缺点是只能在某一额定飞行速度下发动机才能达到最大效率,定距桨最大问题在于不能同时兼顾爬升和巡航两个状态的动力需求。变距桨的优缺点和定距桨相反。目前,定距桨在无人机上的应用较为广泛。
按动力方式可以分为油动桨和电动桨,油动桨是用于油动发动机的螺旋桨,电动桨是用于电机的螺旋桨。两者最主要的区别在于桨叶的厚度,油动桨相对于电动桨来说,桨叶更厚。在螺旋桨选型过程中,应该注意区分油动桨和电动桨。
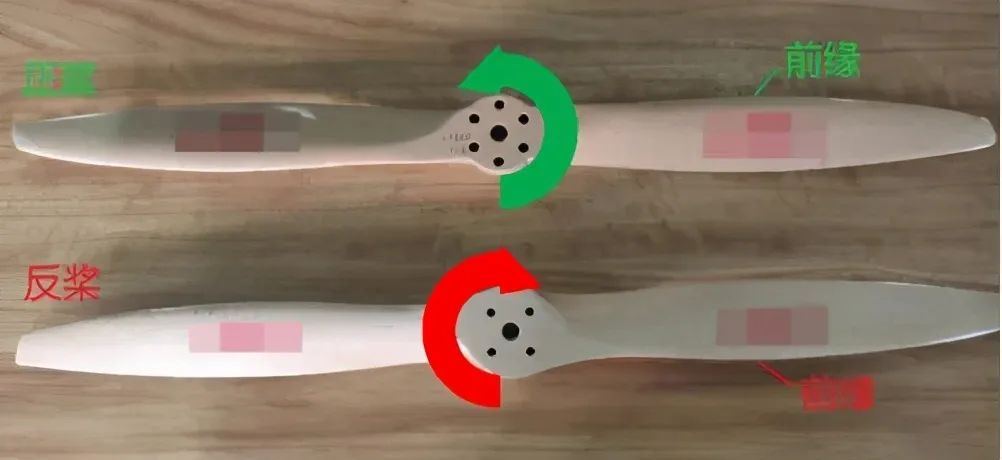
发动机(电机)的旋转方向有顺时针和逆时针之分,为了匹配不同的旋向,螺旋桨就有了正桨和反桨的区分。以螺旋桨的迎风面为正面,逆时针旋转的为正桨,顺时针旋转的为反桨。在螺旋桨选型过程中,应该根据发动机(电机)的旋向选择正反桨。
螺旋桨按材料分类可以分为铝合金桨、木制桨、碳纤维桨、尼龙桨等。其中铝合金桨主要用于有人机,很少用于无人机。木制桨一般用榉木或层板来制造,其强度比尼龙桨大,价格比碳纤维桨低,但是重量较大。碳纤维桨是由复合材料碳纤维制造而成的,优点是强度大,重量轻,但价格较高。尼龙桨的强度较弱,形变量大,但价格较低。目前木制桨和碳纤维桨在无人机中应用的较为广泛,尼龙桨主要用于轻小型无人机。

四、螺旋桨性能指标
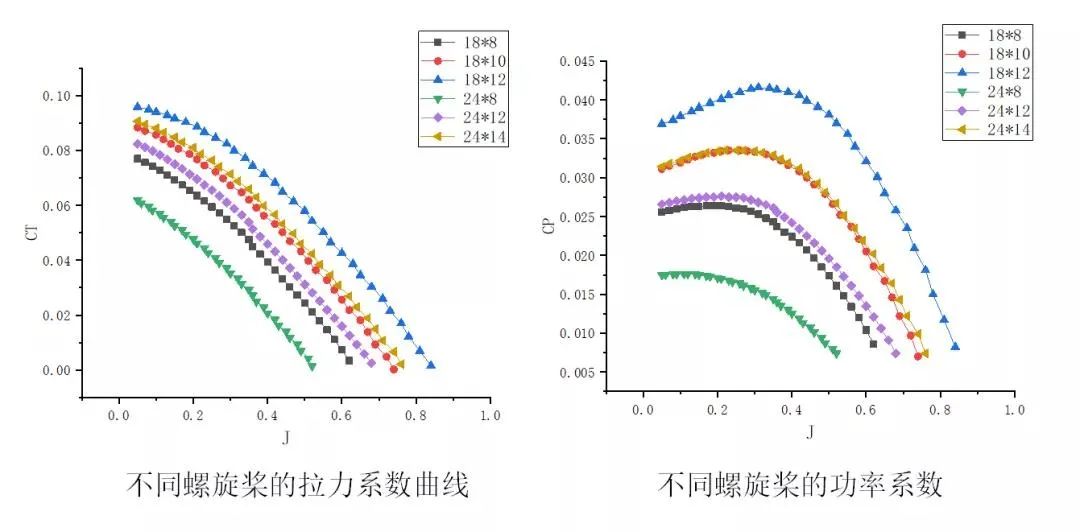
螺旋桨的性能指标主要有三个,分别是拉力、吸收功率和效率,其中效率是由拉力和吸收功率决定的。通常用无量纲量拉力系数和功率系数来表示拉力和功率,计算方法如下:
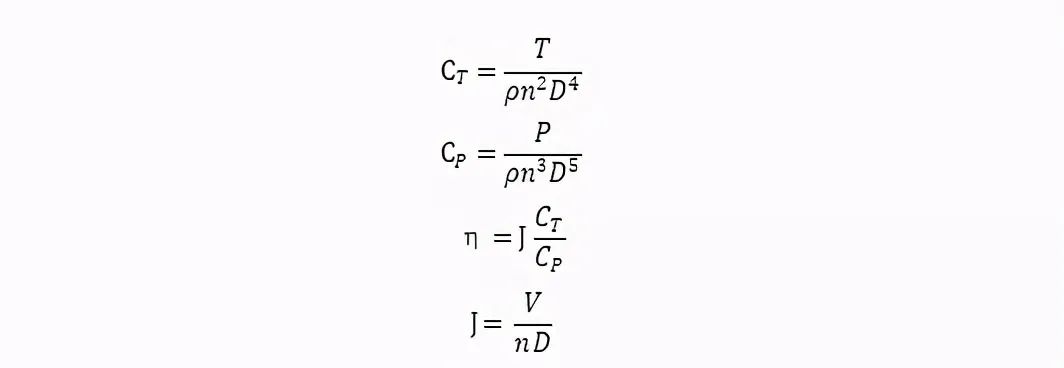
其中,T为拉力、P为螺旋桨吸收功率、ρ为空气密度、n为螺旋桨转速、D为螺旋桨直径、J为螺旋桨前进比、V为来流速度。
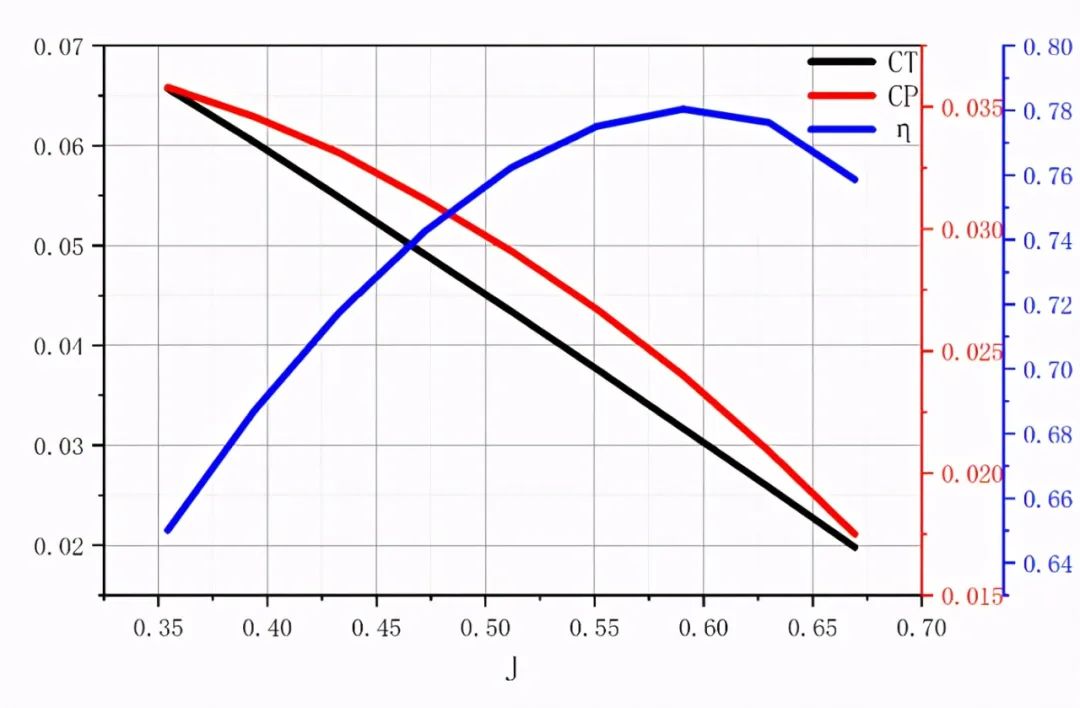
典型的螺旋桨气动性能曲线如图所示:
获得螺旋桨气动性能数据的方法有三个,分别是理论计算、试验测量和CFD计算。
1、理论计算
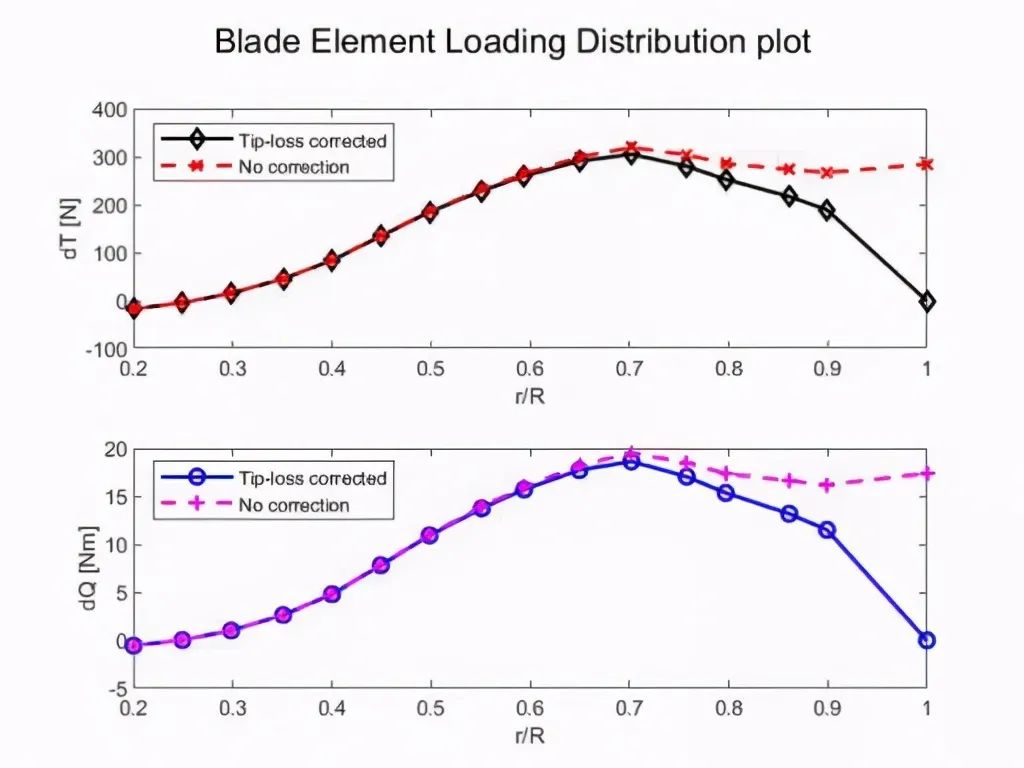
理论计算方法有很多,例如动量理论、叶素理论等等,目前计算最为准确的是片条理论,是在叶素理论的基础上发展而来的。首先求出不同半径位置叶素的气动力,然后沿径向积分得到桨叶的气动力,典型的计算过程如图所示:
2、实验测量
实验测量是在风洞中通过力/矩传感器直接测量螺旋桨不同状态的气动力的方法,实验测试是获得螺旋桨气动性能最准确的方法,但成本较高。
3、CFD计算
CFD计算也是一种最常用的方法,通过数值仿真计算得到螺旋桨的气动力。CFD计算方法不仅可以得到螺旋桨桨的气动性能,还可以通过流场信息,分析螺旋桨和机体之间的干扰。其计算成本比实验测量低,但精度有待进一步提高。
五、螺旋桨的选型
螺旋桨的选型需要结合飞机气动性能、螺旋桨气动性能以及发动机的负载特性,做到螺旋桨与飞机匹配和螺旋桨与发动机匹配。首先通过几何约束,初步选择一个螺旋桨直径范围,然后选择合适的螺距及桨叶数等参数;其次,根据螺旋桨参数评估螺旋桨的气动性能;最后根据飞机气动性能数据、螺旋桨气动性能数据和发动机负载性能数据评估螺旋桨是否满足设计需求。
1、 螺旋桨和飞机匹配
螺旋桨和飞机匹配是指在给定飞行状态下,螺旋桨能够提供飞机飞行所需的推力。具体过程如下:
(1) 由飞机的气动性能确定各个飞行状态的所需推力。
(2) 确定所有备选螺旋桨,以及它们的气动性能,包括不同前进比时的拉力系数和功率系数。
(3) 利用不同飞行状态的速度确定在该速度时,不同转速时螺旋桨的拉力和功率。
(4) 通过发动机或电机最大转速和最大功率确定不同飞行状态的可行域。
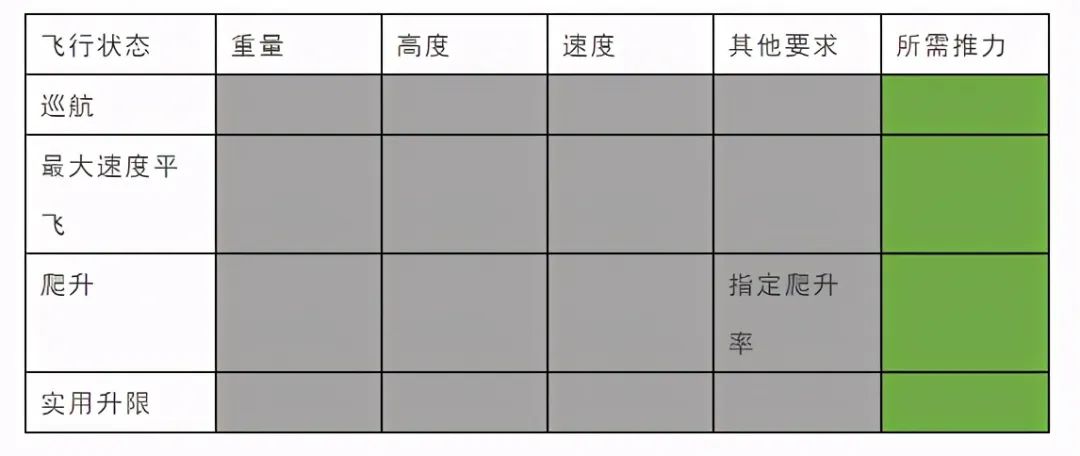
对于垂直起降的固定翼无人机,在螺旋桨选型时,可以主要考虑四种飞行状态,分别是巡航、爬升、最大平飞速度飞行和实用升限飞行。四种飞行状态的所需推力可以通过如下公式计算:

其中,W为重力,γ为爬升角,K为升阻比。
通过下表和上述公式可以确定飞机不同飞行状态的所需推力。
根据飞机总体布局的尺寸限制和成品桨的规格,选择合适的直径范围和螺距范围。然后通过CFD计算或片条理论气动计算程序,以及风洞实验获得所有备选桨叶在不同前进比时的拉力系数和功率系数,再通过拉力系数和功率系数计算出效率。
根据飞机的飞行速度,结合螺旋桨的拉力系数和功率系数,计算螺旋桨在该速度下,不同转速的拉力和所需功率。

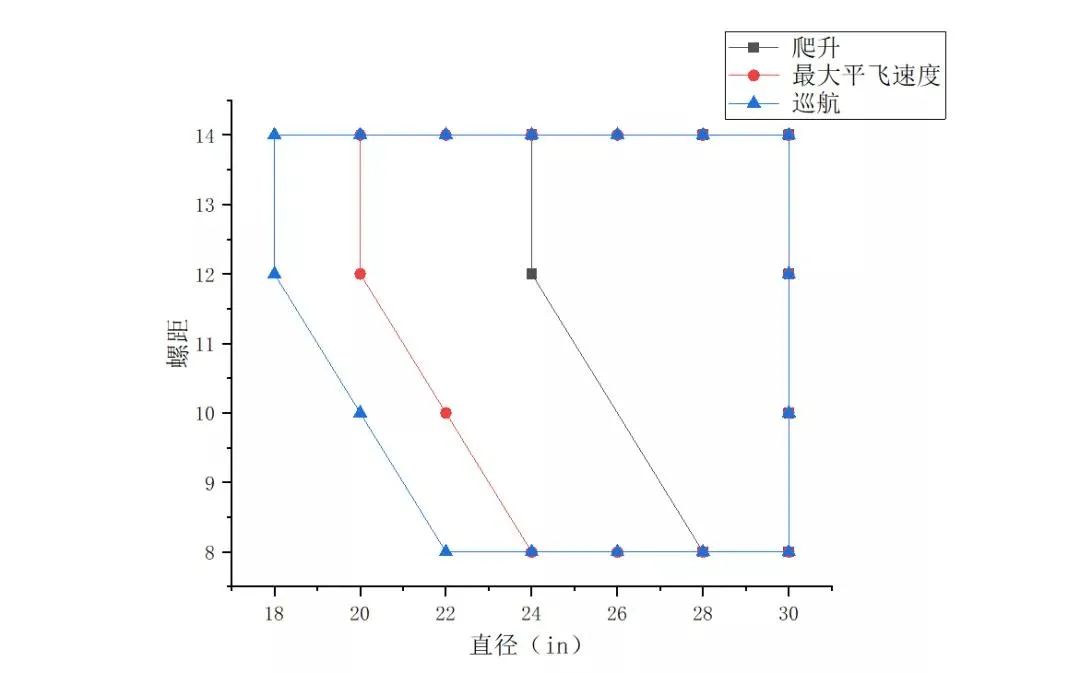
根据不同状态的所需推力、发动机最大转速以及发动机最大功率的限制,确定不同飞行状态螺旋桨直径和螺距的可行域。
2、螺旋桨与发动机匹配
螺旋桨与发动机匹配主要是指螺旋桨的气动力和发动机的负载特性相匹配,即螺旋桨和发动机或电机的效率点相匹配,二者均在最佳工作点上。
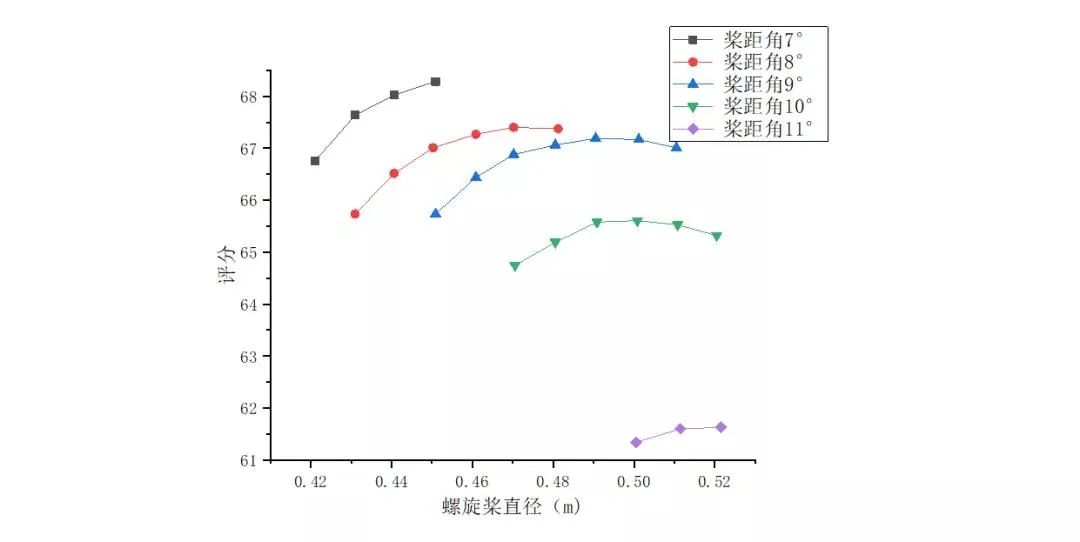
3、螺旋桨的选型目标和评价方法
螺旋桨选型基本目标为在多种飞行性能要求对应状态下,螺旋桨能够与飞机、发动机同时匹配。
螺旋桨评价方法为:按照各飞行性能权重,基于全机小时油耗进行评分,选取最优桨。
不同类型的飞机,飞行剖面中主要飞行状态不同,性能的关注点不同。这里通过对巡航、最大平飞速度、爬升、实用升限等飞行性能选取合适的权重系数,对螺旋桨进行评分,具体如下:
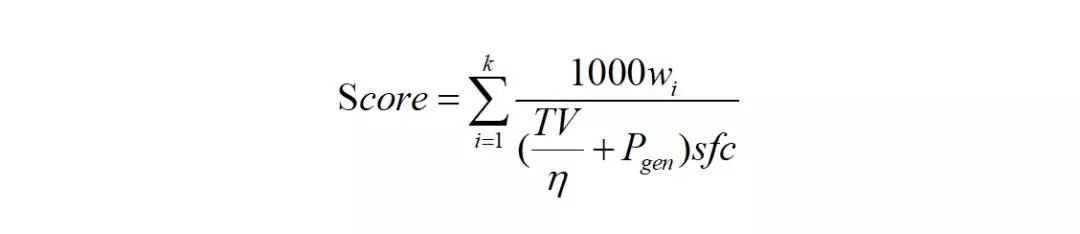
其中,Score为所有飞行状态的总评分,wi为各飞行状态对应的权重,T为拉力,V为速度,η为动力系统效率,Pgen为发电机提取功率,sfc为耗油率。
螺旋桨的选型过程如下:
1、 根据无人机总体布局设计,确定螺旋桨的直径范围,并初步计算不同直径和螺距桨在不同前进比时的气动性能;
2、 确定无人机在不同飞行阶段所需的推力,选择能够同时满足所有飞行条件的螺旋桨;
3、 对待选螺旋桨的性能进行计算和测试,根据评价准则对螺旋桨进行评分,选出最优的螺旋桨;
4、 通过飞行测试,对螺旋桨性能进行检验。
六、垂直起降固定翼无人机螺旋桨
垂直起降固定翼无人机有很多布局形式,复合翼布局、尾坐式布局、倾转旋翼布局是三种最常见的布局。无论是哪种布局方式,垂直起降固定翼无人机都有两种状态,分别是起降时的旋翼状态和平飞时的固定翼状态。其中,尾坐式布局和倾转旋翼布局式无人机在起降和平飞过程中共用一套螺旋桨动力,而复合翼布局无人机在起降和平飞过程中采用两套独立的螺旋桨动力。

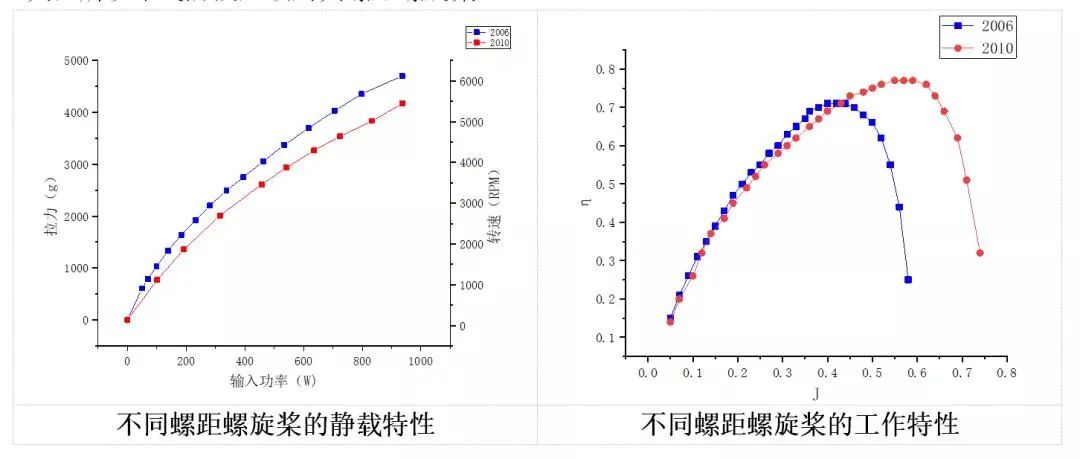
旋翼状态下来流速度几乎为零,且需要螺旋桨产生较大的拉力以平衡无人机自身重力;平飞状态下具有较大的来流速度,且只需要螺旋桨产生能够克服气动阻力(一般为无人机自身重力的1/10左右)的推力即可。因此无人机在旋翼状态下需要小螺距螺旋桨产生较大的静拉力;平飞状态下所需的推力较小,要求用大螺距螺旋桨保证在有来流条件下能产生足够的推力,且使螺旋桨始终工作在最佳效率点处。小螺距螺旋桨与大螺距螺旋桨相比,输入功率相同时静拉力更大,所以垂直起降阶段应该用小螺距螺旋桨;大螺距螺旋桨的最大效率更大,所以平飞阶段应该用大螺距螺旋桨。
尾坐式布局和倾转旋翼布局的优点是只需采用一套螺旋桨动力即可同时满足起降和平飞两种飞行状态,缺点是螺旋桨在两种飞行状态下均不在最佳工作点上,因而整体效率低下。虽然通过增加变距机构能够满足无人机对螺旋桨能力和效率的需求,但轻小型无人机如果加变距机构不仅会增加结构重量,而且会严重减低动力系统的结构与控制可靠性。
复合翼布局采用两套独立的动力系统,缺点是会增加一定的死重,优点是在起降和平飞两种飞行状态下,螺旋桨均能够工作在最佳效率点处;另外,两套动力独立控制,无论是在结构方面还是在控制方面均具有较高的可靠性,且两套动力互为冗余,能够提升无人机的整体安全性。
从当前无人机的实际应用情况来看,复合翼式布局较尾坐式布局和倾转旋翼布局具有更高的可靠性和更广泛的应用。虽然复合翼式布局会存在一定的死重,但通过合理的结构布置,能够有效减低死重的比例;且高效率螺旋桨从气动方面带来的好处可以抵消结构死重的影响,同时复合翼布局无人机在可靠性和安全性方面具有更大的优势。因此,无论从气动效率还是从使用可靠性的角度来看,复合翼布局无人机具有更大的优势。





 •
•  •
•  •
•  •
•  •
•  •
•  •
•  •
•  •
•  •
• 